Robótica - Conceitos Básicos
Veja também:
Pequenos Negócios - Como Ganhar Dinheiro na Internet
A Robótica é o ramo da Ciências, Engenharia e Tecnologia que , unindo eletrônica, mecânica e software, desenvolve máquinas
capazes de realizar atividades de forma programada.
Robôs já são amplamente utilizados na indústria, principalmente para realização de tarefas repetitivas que requerem
precisão de posicionamento. Por exemplo soldagem das chapas da carroceria de um carro, aplicação de tinta, manuseio de
peças na linha de produção etc.



Robôs também são utilizados em atividades perigosas como desativação de uma bomba ou medição do nível de radioatividade
numa usina nuclear.
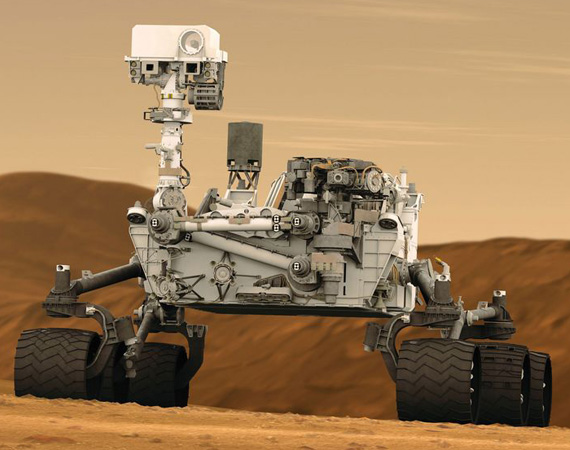
Na pesquisa científica também tem grande aplicação como o Jipe Robô Curiosity que está atualmente explorando a superfície
de Marte.
O robô pode ser totalmente dependente de um sistema de controle remoto ou executar tarefas baseadas em rotinas de software
embarcado. Softwares embarcados são rotinas armazenadas internamente nos circuitos do robô e que podem executar determinadas tarefas,
sem a necessidade de supervisão por sistemas externos
ao robô. O mais comum é uma situação onde é possível comandar remotamente o robô, mas uma vez programado, ele é capaz de realizar
algumas tarefas sem a supervisão externa.
O robô Curiosity, por exemplo, ao se deslocar sobre a superfície de Marte, recebe todo o trajeto previamente por comandos enviados
da Terra. Mas uma, vez em movimento, está por conta própria, pois um comando vindo da Terra, pode levar até 20 minutos para chegar a Marte.
Assim, os sistemas internos do robô tem de estar preparados para abortar o movimento se detectarem alguma coisa anormal no trajeto.
Sem dúvida nenhuma, um dos objetivos mais interessantes da robótica são os robôs humanoides, ou seja, aqueles com formas humanas.
Estes robôs serão capazes em futuro próximo, realizar tarefas humanas do dia a dia como limpar a casa ou realizar uma manutenção externa
na Estação Espacial.
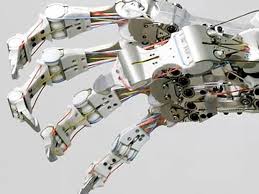
Imitar o corpo humano parece simples mas não é. A mão é uma das ferramentas mais sofisticadas que existe e até hoje não se conseguiu
um artefato mecânico tão versátil quanto ela. O sistema de equilíbrio do corpo humano, que nos permite andar em pé, só agora começa a ser
realizado por robôs com uma certa eficiência. Más com a rápida evolução da eletrônica, computação, nanotecnologia e mecânica fina, estas
barreiras devem ser superadas em breve.
O Robô
A característica principal dos robôs está associada a movimento aliado a precisão. Uma máquina robótica normalmente é desenvolvida
para realizar algum tipo de movimento, onde se espera precisão de posicionamento. Normalmente o movimento é produzido por um motor
elétrico que atua sobre uma junta, provocando o movimento. A cada junta de movimento, normalmente está associado um motor e um sensor
de posição / velocidade. O controle de posicionamento da junta é feito por servo acionamento em malha fechada.
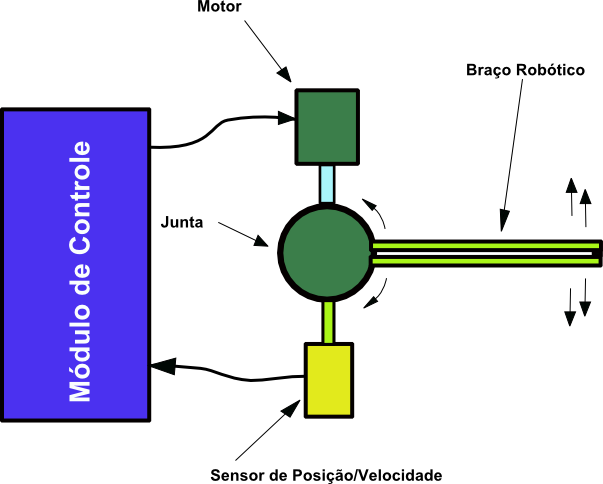
O servo acionamento em malha fechada nada mais é do que você medir a posição do braço, via sensor de posição da junta, e corrigir
esta posição caso ela não esteja onde se deseja. A figura acima exemplifica uma malha fechada de controle. O Módulo de Controle recebe
a informação de posição do Sensor de Posição e atua sobre o Motor caso a posição informada esteja fora do desejado.
Graus de Liberdade
Define-se como grau de liberdade (GDL) cada possibilidade de movimento que o robô pode executar. No exemplo da figura anterior temos um sistema
com 1 GDL, já que só é possível fazer 1 movimento (girar o braço). Só para comparação, o braço humano é considerado um sistema com 7 GDL. Para você
simular o braço humano, seria necessário um sistema com pelo menos 7 graus de liberdade de movimentos. Estes movimentos podem ser giratório, linear
ou a combinação dos dois.
Um sistema robótico industrial pode ter facilmente 5 ou 6 GDL e com isso realizar movimentos complexos e precisos. Para o controle de todos estes
movimentos, são necessárias rotinas de software que atuam sobre cada junta de movimento. Quando o software é embarcado no robô, ou seja, roda dentro
do módulo eletrônico do robô, ele é chamado de firmware.
O firmware do robô tem de ser capaz de controlar cada junta individualmente ou realizar movimentos combinados de 2 ou mais juntas para obter
trajetórias complexas do braço robótico.
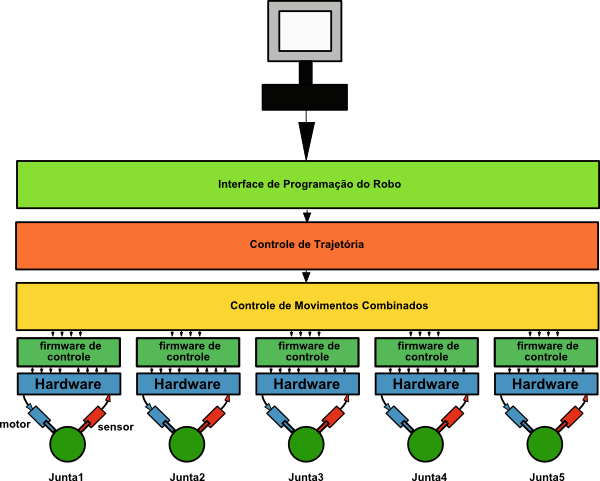
Esta tarefa normalmente é dividida em módulos de software e hardware para facilitar a tarefa de programação. São criados módulos específicos
e mais simples que se encarregam de apenas controlar o motor da junta em função do sinal lido no sensor de posição/ velocidade. Na figura acima,
o Módulo de Controle da Trajetória, calcula todos os movimentos das juntas necessários para que o braço do robô execute o movimento desejado. A
trajetória então é passada para o Módulo de Movimentos Combinados que se encarrega de combinar os movimentos da juntas para obter a trajetória
desejada. Por fim, o hardware de cada junta, fica controlando a posição / velocidade do motor da junta em função do sinal de posição/velocidade
informado pelo sensor. Esta condição é dinâmica e atualizada constantemente pelos Módulos de Software do sistema.