Projeto passo a passo de um Drone Hexacóptero
Drone para Monitoramento Ambiental
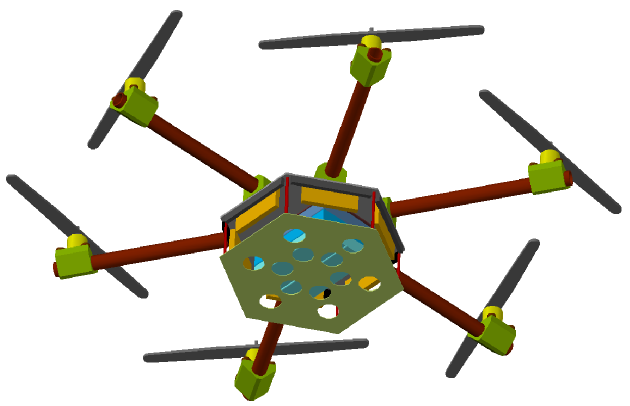
Queremos desenvolver um Drone Hexacóptero, com tecnologia nacional para monitoramento ambiental.
Para que serve?
Estamos projetando este Drone para missões autônomas de monitoramento ambiental, que podem
incluir:
- Vigilância contra invasão de reservas ambientais;
- Detecção de fogo em áreas remotas;
- Detecção de desmatamentos não autorizados;
- Mapeamento de áreas de reserva;
- Acompanhamento de animais silvestres com anilhas eletrônicas de monitoramento;
- Monitoramento de dados atmosféricos como temperatura, pressão, irradiação luminosa, umidade etc;
- Filmagem e fotografia de ninhos, pássaros ou outras amostras da fauna e flora, em lugares de difícil acesso;
- Inspeção por imagem de estruturas de pontes, prédios, barragens etc;
- Projetos educativos, unindo tecnologia e meio ambiente;
Porque Desenvolver e não Comprar?
Você sabia que a diferença entre o que o Brasil exporta e importa na área eletro eletrônica vai chegar a
um deficit de US$ 35 bilhões em 2014? Nós vamos exportar cerca de US$ 7 bilhões e vamos importar cerca de US$
42 bilhões. Você sabia que os 11 primeiros produtos que constam da lista de exportações do Brasil, são do agro
negócio? Ou seja, soja, farelo, açúcar, carne etc. O primeiro produto de tecnologia - Carro de passeio - aparece
na 12ª posição e representa apenas 1,4% do total de exportação.
Recursos Básicos
Para cumprir a função o Drone deverá permitir o voo autônomo, ou seja, sem a intervenção do piloto. Este tipo de voo é
conhecido como fly by waypoints, que traduzindo, significa voar por pontos previamente estabelecidos. Esta trajetória
é estabelecida previamente antes do voo. Ela inclui a latitude, longitude e altitude de cada ponto por onde o drone
deverá passar. Quando o voo começa, a placa de navegação interpola os ponto de navegação, controlando o drone para que se
desloque de um ponto ao outro adjacente, até que complete o percurso, pré programado em sua memória de voo. O destino
final do Drone poderá ser o ponto de partida ou uma outra base remota.
Para operações de decolagem e pouso manuais, via controle do piloto, utilizaremos uma interface desenvolvida para
celular com Android e comunicação via WiFi.
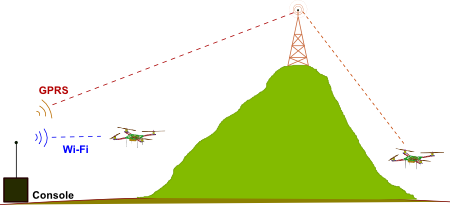
Outra característica importante deverá ser a capacidade de transmitir dados em tempo real. Estes dados podem ser a imagem
captada por uma câmera ou dados científicos coletados por sensores.
A carga a ser transportada pelo Drone poderá ser uma câmera de filmagem, sensores de coleta de dados ou outra carga qualquer.
O tempo de voo é afetado pelo peso total da carga. Nossos cálculos prévios, como veremos adiante, indicam um peso máximo em
torno de 500g para a carga.
É desejável também a maior autonomia de voo possível, com a carga prevista. Veremos que voo acima de 40 minutos exigem
baterias muito caras. Nosso cálculo prévio indica um tempo de voo em torno de 40 minutos com um pack de baterias comuns
de mercado, para transportar a carga de 500g.
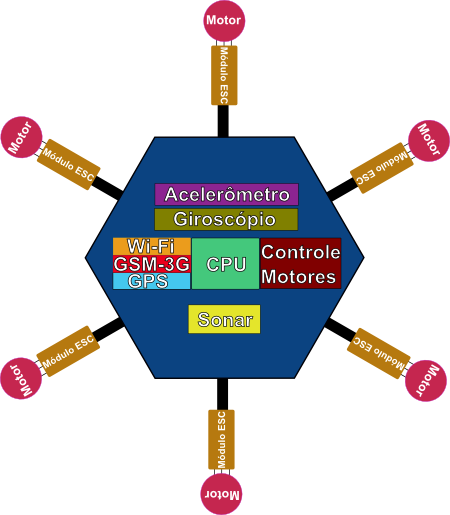
Assim o Drone deverá ter as seguintes características:
- Placa de navegação com capacidade para voo autônomo (waypoints);
- Comunicação WiFi com celular;
- Comunicação 3G para transmissão de dados e controle;
- GPS interno para verificação do posicionamento do Drone;