Cálculo da Autonomia de Voo de um Drone
Introdução
Quando se desenvolve qualquer veículo movido a energia elétrica, o objetivo é conseguir uma grande autonomia
de rodagem (carros, motos e caminhões) ou de voo (aviões, drones etc). A baixa autonomia, se comparada aos veículos
convencionais, movidos a combustíveis líquidos, é o que emperra a industria de veículos elétricos e mantém forte
a indústria de veículos convencionais.
A indústria automobilística é a que está mais avançada na tecnologia de veículos elétricos. Hoje já estão
disponíveis comercialmente, carros e motos totalmente movidos a energia elétrica e as versões híbridas que combinam
o motor a combustão interna com motores elétricos.
A energia destes veículos elétricos, como sabemos, é armazenada em baterias. Uma das características mais
importantes das baterias para veículos elétricos é a chamada densidade de energia.
Densidade de energia é a energia máxima que a bateria pode armazenar dividida pelo seu peso. Normalmente é
expressa em Wh/kg ("watts hora por quilograma")
Como exemplo de cálculo de densidade de energia, vamos considerar uma bateria LiPo de 2800mAh e 11,1V de voltagem de saída.
Esta bateria pesa em média 300g.
Esta bateria pode fornecer 2800 mA (2,8A) por 1 hora. Assim a energia é calculada por:
E = P x T (fórmula 1);
Onde:
E é a energia total armazenada na bateria
P é a potência de saída
T é o tempo
Então:
E = P x T = 2,8A x 11,1V x 1h = 31,1Wh;
Dividindo pelo peso em kg temos a densidade de energia D:
D = E / P = 31,1Wh / 0,3Kg = 103,6 Wh/Kg ;
Calculando a Autonomia de Voo
A densidade de energia da bateria que escolhermos para alimentar os motores do Drone é o que vai definir a autonomia de voo.
Vamos definir o peso total do Drone pela seguinte fórmula:
PT = PE + PB + PC (fórmula 2);
Onde:
PT é o peso total do Drone
PE é o peso da estrutura do Drone (suportes, placas eletrônica, fios)
PB é o peso da bateria
PC é o peso da carga útil
De acordo com nosso Objetivo, a carga útil PC = 500g.
PE teremos que estimar. Considerando uma plataforma construída com tubos de fibra de carbono, vamos estimar o peso em
400g. Placa eletrônica e fios estimaremos em 300g. Então PE = 700g. Este valor será corrigidos quando finalizarmos o
projeto em CAD e durante a fase de montagem dos protótipos.
O peso dos motores e hélices não entram na conta porque vamos considerar o empuxo líquido da cada motor + hélice,
ou seja, é o empuxo útil que o conjunto consegue fornecer.
Vamos definir o peso da bateria em função de sua densidade de energia:
PB = ET / D (fórmula 3);
onde:
PB é o peso do conjunto de baterias do drone;
ET é a energia total que utilizaremos para manter o Drone voando por 40 minutos;
D é a densidade de energia da bateria que escolhermos;
Pela fórmula 3 acima, dá para perceber que o peso da bateria é proporcional à energia total que precisamos para manter
o Drone voando pelo tempo de 40 minutos. Então precisamos primeiro calcular esta energia total para depois podermos
calcular o peso da bateria. Para isto vamos definir o que é empuxo líquido.
Empuxo Liquido:
Como já vimos o empuxo líquido é o empuxo final que um conjunto motor + hélice pode fornecer, já descontando o peso
do conjunto. É a força útil que poderá ser utilizada pelo Drone.

Abaixo apresentamos a tabela de um fabricante para termos idéia do consumo de energia do sistema:
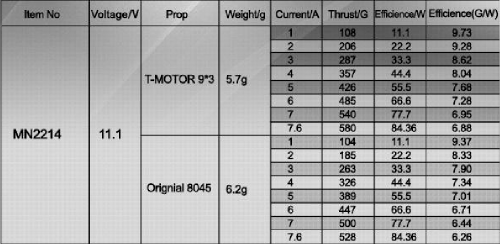
Esta tabela é para uma hélice de 9". Pela tabela, na última coluna, nós temos o parâmetro G/W. Este parâmetro
indica quantos gramas de empuxo são obtidos para cada Watt de potência entregue ao motor. Vamos selecionar a pior
condição para o motor do tipo T-Motor que é 6.88 G/W vamos chamar este parâmetro de TE (empuxo específico)
TE = 6,88 G/W;
Qual o Empuxo Total (TT) necessário para o Drone voar e fazer manobras? Quando o Drone ganhar altura ele
estará consumindo mais potência. Quando perder altura a potência consumida será menor. Assim vamos
adotar a potência do Drone parado no ar como o valor médio de consumo. Vamos também prever uma sobra de 20% para
compensar as aproximações destes cálculos e permitir que o Drone faça as manobras.
Pelas considerações anteriores, o Empuxo Total (TT) médio deverá ser:
TT = PT Onde PT é o peso total do Drone;
Pela tabela do fabricante, na potência máxima, nós vamos conseguir cerca de 580g para cada conjunto hélice/motor.
Como o Drone tem 6 conjuntos, o empuxo máximo que conseguiremos é de:
TT = 580 x 6 x 80% = 2784g (o fator 80% é a reserva de
empuxo para manobras);
Assim, o peso máximo para a bateria tem de ser:
PB = TT - PE - PC = 2784 - 700 - 500 = 1584g;
A potência PW necessária para manter o Drone parado no ar é dada por:
PW = (TT/TE) = 2784 / 6,88 = 405W;
Consuderando o tempo de voo TV = 40 minutos, TV = 0,66h. A energia gasta em 40 minutos (0,66h) é dada por:
ET = PW x TV = 405W x 0,66h = 267Wh;
ET = 267Wh;
Se dividirmos a energia total consumida em TV (40 minutos) pelo peso máximo da bateria em Kg, chegaremos
à densidade de energia necessária apara atingirmos esta autonomia.
D = ET / PB = 168 Wh/Kg;
Aqui encontramos nosso primeiro problema na especificação do Drone. As baterias LiPo, que apresentam a melhor
densidade de energia a um custo mais reduzido, disponíveis no mercado, tem, em média, uma densidade de energia da
ordem de 140 Wh/Kg. Ou seja, com baterias LiPo comuns de mercado não conseguiremos atingir a autonomia de 40 minutos de voo.
E não adianta colocar mais baterias no Drone porque o empuxo de 6 hélices não seria suficiente para tirar o Drone do chão.
A estimativa é que o drone consiga voar por (140 / 168) x 0,66h = 0,55h = 33 minutos.
Os cálculos acima mostram como é importante construir um Drone o mais leve possível. Durante a fase de protótipo
tentaremos aliviar ao máximo o peso da estrutura para aumentar o tempo de voo TV.
Assim, o Drone passa a ter a seguinte especificação:
- Carga útil máxima: 500g
- Empuxo máximo: 3480g
- Autonomia: 33 minutos de voo (para uma bateria com densidade de carga de 140W/Kg)
