Especificação do Conjunto Eletrônico
Recursos
Um drone avançado utiliza normalmente os seguintes recursos e tecnologias:
- Módulo de Controle dos Motores - o mais autônomo possível, independente do piloto;
- Sistema GPS para saber a própria localização;
- Módulo "Sonar" para facilitar a aterissagem;
- Comunicação com SmartPhone ou outro controle remoto, utilizado como Console de pilotagem;
- Agoritmo de deslocamento autônomo com percurso pré programado;
Um diagrama em blocos da eletrônica é apresentado na figura 1:
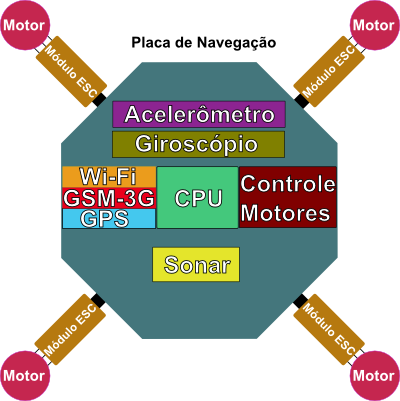 Fig 1
Fig 1
CPU
A CPU tem a função de controle integral do Drone, incluindo a navegação e comunicação
com o Console de Controle. Ela necessita de alta capacidade de processamento e armazenamento
de informações.
Acelerômetro (inclinômetro)
O Módulo Acelerômetro permite a medição da inclinação do Drone. A medição da inclinação
é necessária para a navegação. Manobras "para frente", "para trás", "para esquerda"
e "para direita" são baseadas na inclinação do Drone. Manter o Drone planando é
um dos principais desafios do projeto e para isto a medição precisa da inclinação
é muito importante.
Giroscópio
O Módulo giroscópio permite a medição da velocidade angular do Drone nos 3 eixos,
X, Y e Z. Esta medição
é importante para manter o Drone estável e numa posição desejada. O Giroscópio mais o
acelerômetro são os sensores que permitirão a navegação inercial do Drone. Navegação
inercial é quando o Drone está voando sem estar conectado mecanicamente a nada.
As únicas referências que o Drone recebe são a direção da força da gravidade (acelerômetro)
e as coordenadas GPS.
Controle do Motor
O Módulo de Motor deverá controlar os 4 (quadricóptero) ou 6 (hexacóptero) motores
simultaneamente para garantir a navegação do Drone. Este módulo recebe a informação
do acelerômetro e do giroscópio e controla os pares motor-hélice, gerando as forças
necessárias para manter o Drone estável. Este módulo também é responsável pelas
outras ações do Drone que são:planar,
deslocar-se a esquerda, a direita, a frente e a ré, subir, descer e pousar.
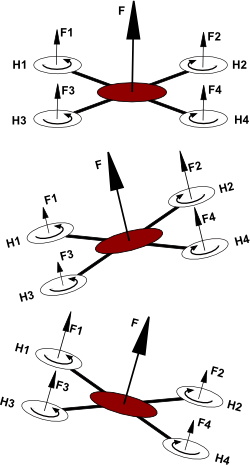 Fig 2
Fig 2
GPS
Via sinal GPS, este módulo informa à CPU a localização exata do Drone, além da orientação
norte-sul.
GSM-3G
Este Módulo é responsável pela comunicação com o Console de Controle, permitindo
a transferência de dados como mudanças de programação e transmissão de imagens.
Ele utiliza as estações 3G da telefonia móvel.
Wi-Fi
A utilização de 3G e Wi-Fi parece reduntante mas a disponibilidade de 3G depende
dos serviços de telefonia móvel. Assim, para a pilotagem próxima do Drone, para
pouso e decolagem, por exemplo, o uso do 3G não é viável. Sabemos que a conexão
3G pode ser instável e se acontecer durante uma operação de pouso ou decolagem,
vai inviabilizar a pilotagem. Por outro lado, a conexão Wi-Fi direta entre o smartphone
e o Drone é bem mais estável e ficará dedicada a operação de pilotagem.
Sonar
Para a operação de pouso autônomo do Drone um sinal de sonar via ultrasom é necessário.
O pouso autônomo é uma operação sem supervisão do Console de Controle. O Sonar medirá a distância ao solo, informando à CPU que controlará a velocidade de descida do Drone.
ESC
Os 4 Módulos ESC (Electronic Speed Control) são os circuitos driver dos motores.
Estes motores são do tipo brushless (sem escovas) com 3 fases. Os Módulos ESC recebem a alimentação diretamente da bateria LiPo. O sinal de controle é do tipo PWM de 50Hz, com pulse width variando de 10 a 90% (2mS a 18mS).

